
LOADING...

TR100拖拉机无人驾驶控制系统
北斗无人驾驶拖拉机是上海联适导航在主流电气化程度较高的拖拉机上改装无人驾驶拖拉机,无人驾驶拖拉机能够自动完成预先设定地块的翻地、播种、中耕任务,车辆作业全程可不需要人参与,自动化的完成路径规划、路径跟踪、自动调头、农具自动控制等动作,系统采用高精度北斗定位,控制精度在±2.5cm以内,作业精度高,作业速度快,作业过程完全模拟人工操作,尽可能减少地头调头距离,避免轧苗。控制系统搭配智能算法,智能根据负载匹配转速和档位,尽可能提高燃油效率,减少生产支出,提高生产收益。
通过对行走控制、车辆启动和熄火控制、悬挂控制、多路阀控制等部分的智能改造。行走控制实现车辆的停止、后退、前进,以及速度的调节,具体实现方式有两种,一种是使用推杆电机机械方式实现,另外一种是输入模拟量电子方式控制;车辆的启动和熄火,使用继电器,实现电路的连接或者断开,模拟人手操作车钥匙门;悬挂等控制,驱动控制器控制车辆相关电信号实现农具的动作,并通过霍尔传感器来感知农具当前高度。
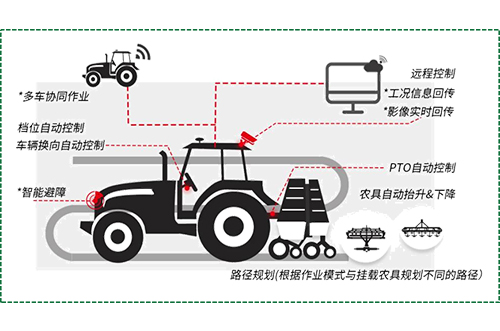
车辆全程无人控制(点火熄火控制、车辆行走控制、车辆农具控制、车辆转向控制)
云端路径规划及自主规划(车辆路径规划行驶控制、远程云端自主规划路径)
安全避障控制(车辆雷达避障控制)
车辆手自动驾驶切换控制
车辆远程云端控制
远程视频监控
支持播种加肥、收割运粮等无人协同作业
|
项目 |
设计值 |
|
转向控制 |
电动方向盘 |
|
车载计算机处理器型号 |
Allwinner T3 |
|
车载计算机内存 |
2GB |
|
车载计算机硬盘 |
16GB |
|
车载计算机操作系统及软件版本 |
Android 6.0/6.0.1 |
|
车载计算机显示终端尺寸及分辨率 |
10寸 1024×600 px |
|
车载计算机接口种类 |
RS232、CAN |
|
车载计算机数据输入输出协议 |
NMEA |
|
卫星接收机类型及频点 |
T100/BDS B1/B2+GPS L1/L2+GLONASS L1/L2+GALILEO E1/E5b |
|
卫星接收机主机板固件版本 |
Build19222 |
|
卫星接收机通道数 |
432通道 |
|
卫星接收机接口种类 |
BDS+GPS+GLONASS+GALILEO |
|
卫星接收机差分类型 |
RTK |
|
卫星接收机数据更新率 |
10HZ |
|
卫星接收机接收天线型式 |
双天线 |
|
转向控制器主板固件版本 |
2322 |
|
转动电机型号规格 |
EMS2 |
|
角度传感器型号规格 |
424A06A090 |
|
移动基站信号覆盖范围 |
≥3km |
|
固定基站信号覆盖范围 |
≥40km |
|
无线电发射设备频率 |
440-460 |
|
网络基站发射设备功率 |
5w |
|
集成部分组成 |
卫星接收机与卫星天线集成、控制器与转向电机集成 |
|
直线控制精度 |
±2.5cm |
|
远程控制 |
遥控转向、调速、熄火、启停、农具控制 |
|
遥控通讯方式 |
2.4G、网络 |
|
协同作业功能 |
有 |
GNSS天线
卫星接收天线采用高增益多频多模GNSS天线,支持北斗,GPS,GLONASS以及伽利略等卫星信号,结构坚固,三防性能好,防水,防尘,具有较强的抗振性,同时具有耐高低温等特点; GNSS天线,主要用于同频转发系统作发射天线使用,天线由天线罩、微带辐射器、底板和高频输出插座等部分组成,用于GPS导航、定位系统作接收天线使用。
|
名称 |
参数 |
|
频率输出 |
GPS:L1/L2;GLONASS:L1/L2;BDS: B1/B2/B3 |
|
阻抗 |
50欧姆 |
|
最高增益 |
5.5DBi |
|
工作电压 |
3.3V-12V |
|
工作电流 |
<45mA |
|
工作温度 |
-45℃~+45℃ |
|
存储温度 |
-55℃~+85℃ |
|
湿度 |
95℃不冷凝 |
|
水平面覆盖角度 |
60° |
|
差分传输延迟 |
≤5ns |
|
天线尺寸 |
Φ152*62.2mm |
|
相位中心差 |
±2mm |
T100显示终端
T100终端在工作中实时处理基站端与车载端接收的定位数据并将其整合为RTK定位精度,同时通过无人驾驶软件接收传感器反馈数据并处理后,下发控制指令来控制执行机构完成无人控制。

|
名称 |
参数 |
|
处理器 |
ARM Cortex-A7,1.5GHz,4核处理器,主频1.5GHz,板载2GB内存,16GB存储 |
|
防护等级 |
IP67防护 |
|
通讯数据 |
支持电台、双4G网络数据通讯,保证数据连续稳定性 |
|
差分数据 |
RTCM 2.3/3.0/3.2,CMR |
|
供电信息 |
DC 9~36V,带正负极性反接保护,支持断电检测 |
|
工作温度 |
-40℃~+70℃ |
|
存储温度 |
-45℃~+80℃ |
|
物理尺寸 |
224mm×160mm ×45mm |
|
重量 |
1.36Kg |
|
撞击和振动 |
MIL-STD-810G |
EMS转向驱动电机
在工作中实时接收上位机软件发送指令并执行命令,对机车实现精准转向控制,传感器实时获取行走时轮胎角度,反馈到上位机,上位机结合卫星定位数据与传感器反馈数据对转向控制单元下发指令。

|
名称 |
参数 |
|
额定电压 |
12V |
|
额定电流 |
10A |
|
堵转电流 |
25A |
|
电压供电范围 |
DC6-30V |
|
通讯协议 |
ModBUS |
|
编码器分辨率 |
1000线 |
|
编码器最大输出频率 |
200KHz |
|
直径/高度 |
178mm/81mm |
|
重量 |
5.25Kg |
|
存储温度 |
-45℃—150℃ |
|
作业温度 |
-40℃—105℃ |
|
额定转速 |
100rnmp |
|
额定转矩 |
10N/m |
|
连续保证运行速度 |
100rnmp |
无人驾驶系统控制器
无人驾驶控制器在工作中实时处理上位机下发指令并将其指令转换为控制数据并对执行机构进行控制,同时将执行机构反馈的数据进行处理转发至上位机,从而实现整个无人控制系统的闭环控制。
|
名称 |
参数 |
|
工作温度 |
-20℃~+65℃ |
|
存储温度 |
-40℃~+85℃ |
|
防护等级 |
IP67 |
无人拖拉机的发展趋势如何?
我国大力发展智能新兴产业,推动高端、先进、智能农机的研发、试验和应用推广。
以农机自动驾驶技术为代表的先进、智能农机已开始量产和产业化。
今年,农业农村部农业机械化管理司又将“指导开展无人化生产农场研究试验”纳入2020年的工作要点。推进农业科技进步,开展农机无人驾驶研究是我国下一步农业机械的重要发展方向,也是未来我国农业的发展趋势。
无人驾驶拖拉机的优点有哪些?
一直以来拖拉机在全世界的农业生产活动中一直扮演着至关重要的角色,相对于传统的作业方式,无人驾驶拖拉机可以节省大量的人力物力等资源。拖拉机无人驾驶系统主要包括四大关键技术:车身定位、农具控制、避障感知、路径规划。
车身定位:北斗卫星可以给无人驾驶车辆提供全天候、高精度和实时的位置、速度和时间信息。
农具控制:通过CAN总线进行实时精确控制。机具作业控制主要包括两个方面,一是对于悬挂控制,抬升和下降农机具;二是机具内部机构的控制,以智能电控播种机为例,将播种机接入CAN网络,就可以对播种机的植株距离、播种量的启停和施肥量等精准的控制。
避障感知:使用高分辨率、抗干扰性强的毫米波雷达来侦测前方是否有障碍物,如果监测到障碍物,则会立即减速停车。
路径规划:实现农机的自主控制后,我们要告诉农机沿着什么样的路径作业和转弯,在不同的区域设定相应速度。因此,我们要提前测量出作业地块,根据农田边界和障碍物分布,规划农机作业的最优路径。
什么车型能够安装拖拉机无人驾驶系统?
带有动力换挡、动力换向的拖拉机更易于无人驾驶的安装。
ZL201711006489.3
ZL201910387364.2
ZL202010523732.4
ZL202010402468.9
ZL201710783459.7
ZL201711153658.6
ZL202110960688.8
ZL202110967426.4
ZL201621107487.4
ZL201720254771.2
ZL201720593198.8
ZL201721553471.0
ZL201821573510.8
ZL201921489088.2
ZL201922207412.3
ZL201922316858.X
ZL202021274822.6
ZL201830302102.8
ZL201830302101.3
ZL202130372042.9
ZL202130371981.1
ZL202130540854.X
ZL201710881452.9
ZL202010928167.X
ZL201710495442.1
ZL201811126726.4
ZL201510214364.4
ZL201711278667.8
ZL202110666620.9
ZL202010826010.6
ZL202020252293.3
ZL202010783279.0
ZL202121954489.8
这些产品与它相得益彰。
你可能也喜欢!






外观专利:ZL202130262517.9 ZL202130707810.1 ZL202130737510.8 ZL202130707473.6 ZL202130703925.3
